
A robot simulator written in ThreeJS , with inverse kinematics support
 KineSim: A three.js based 3D robot interface.
KineSim: A three.js based 3D robot interface.
Download or clone. Open or . Enjoy 🤖😀
index.htmlYou may need to use Chrome, since some ES6 features are not supported in other browsers yet.
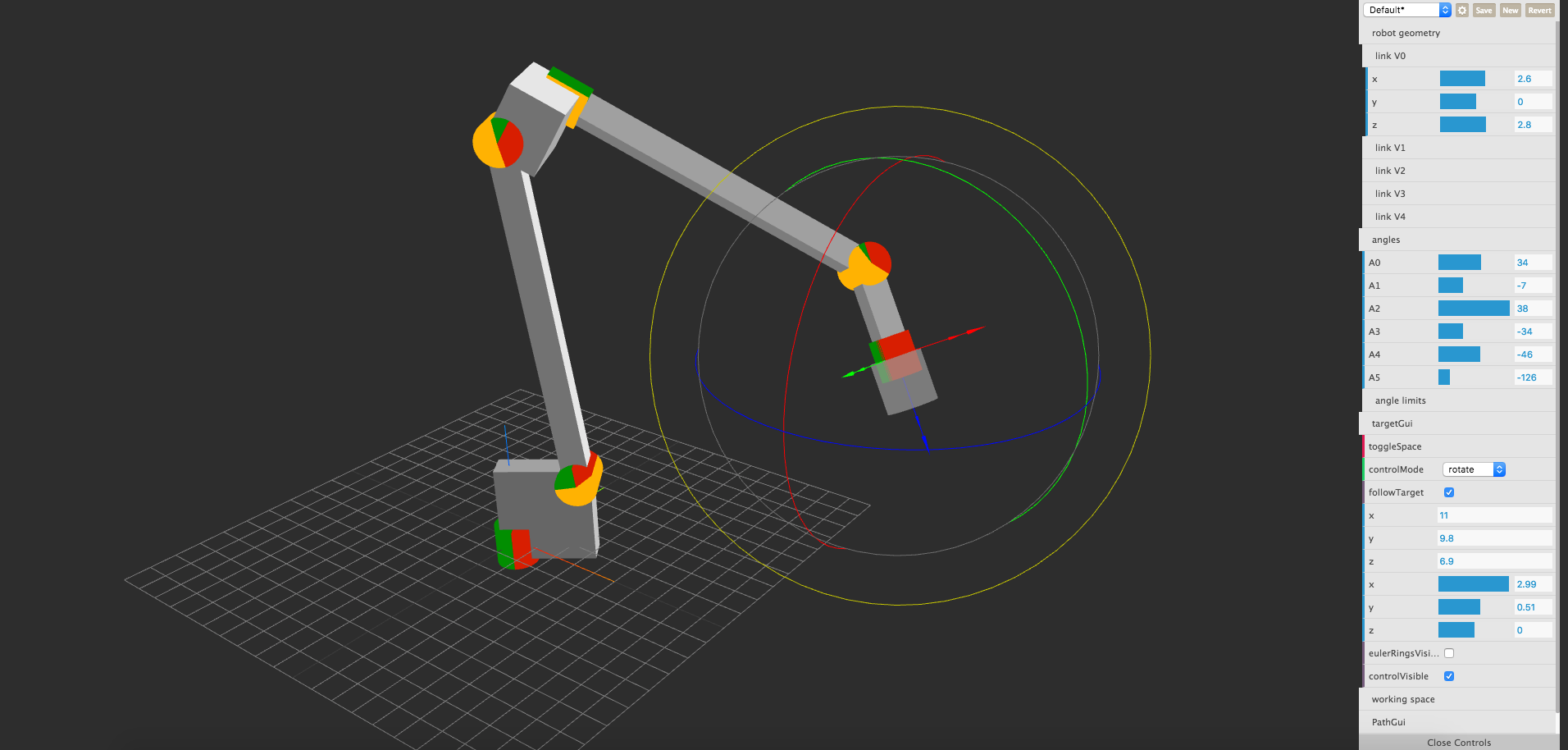
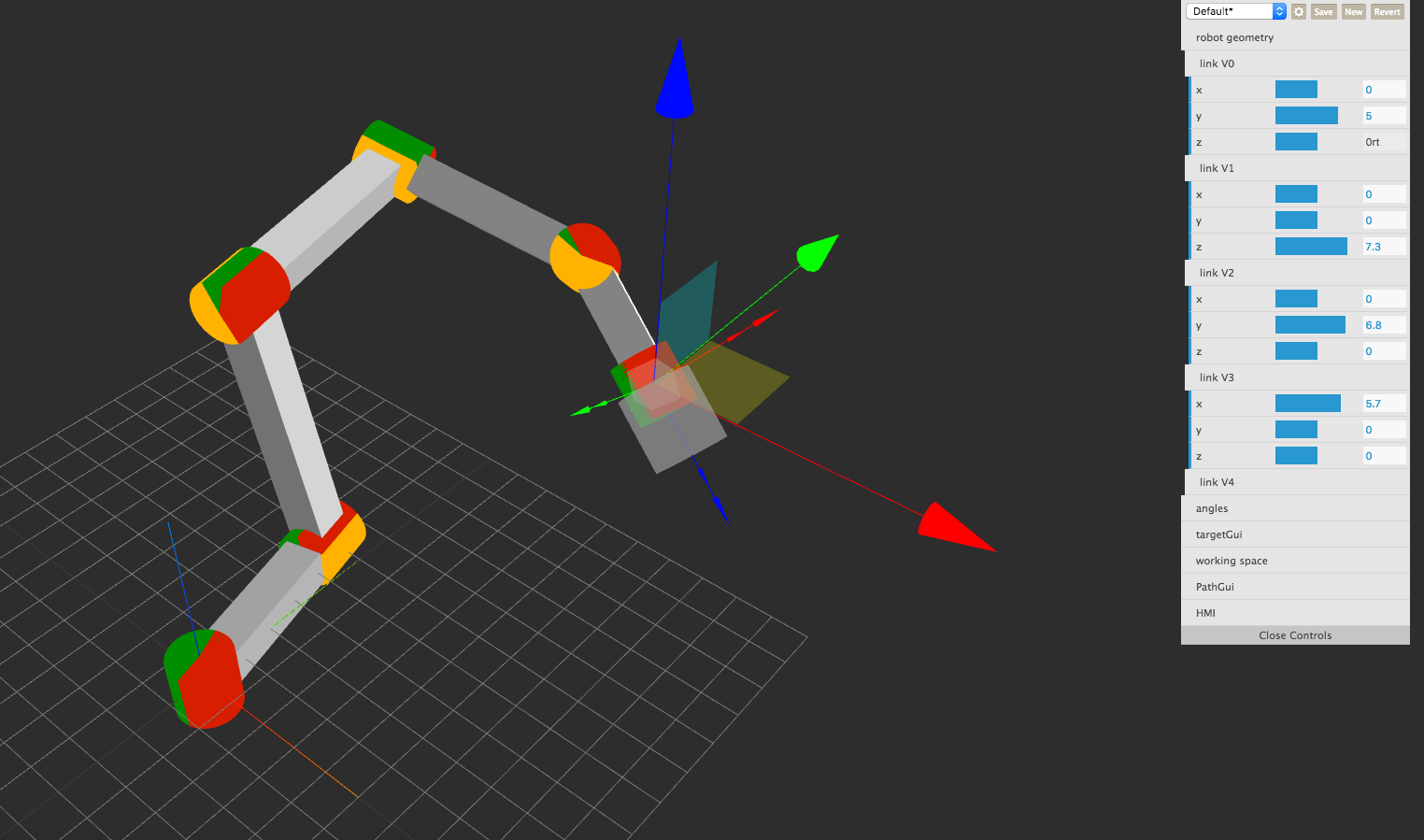
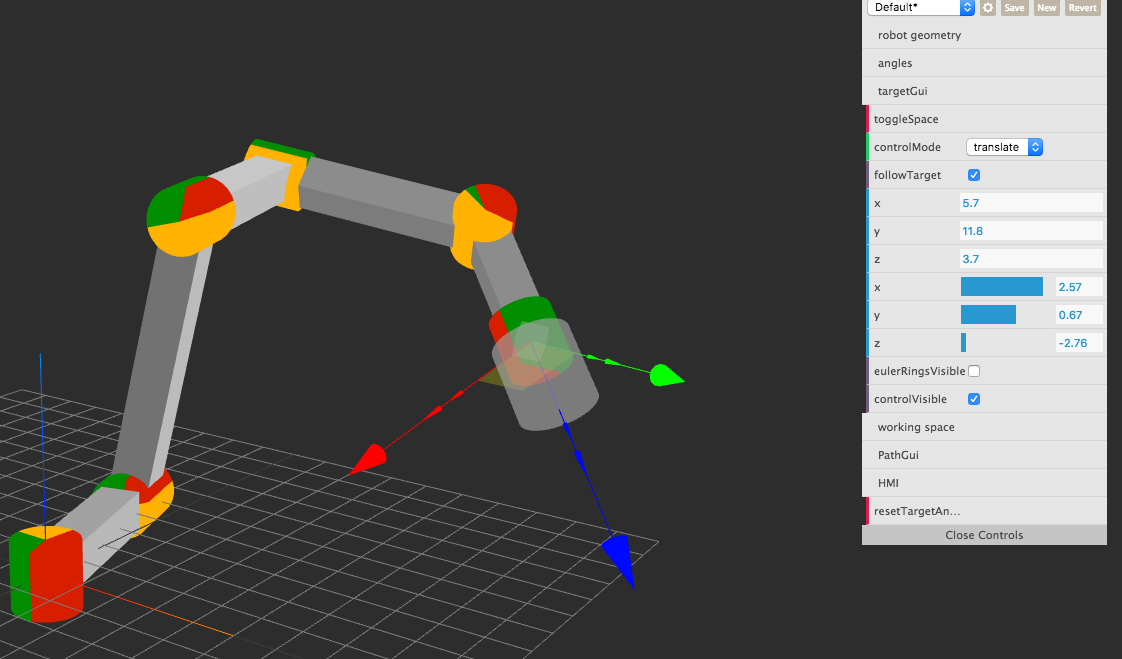
Configure the robot geometry using the geometry tab.
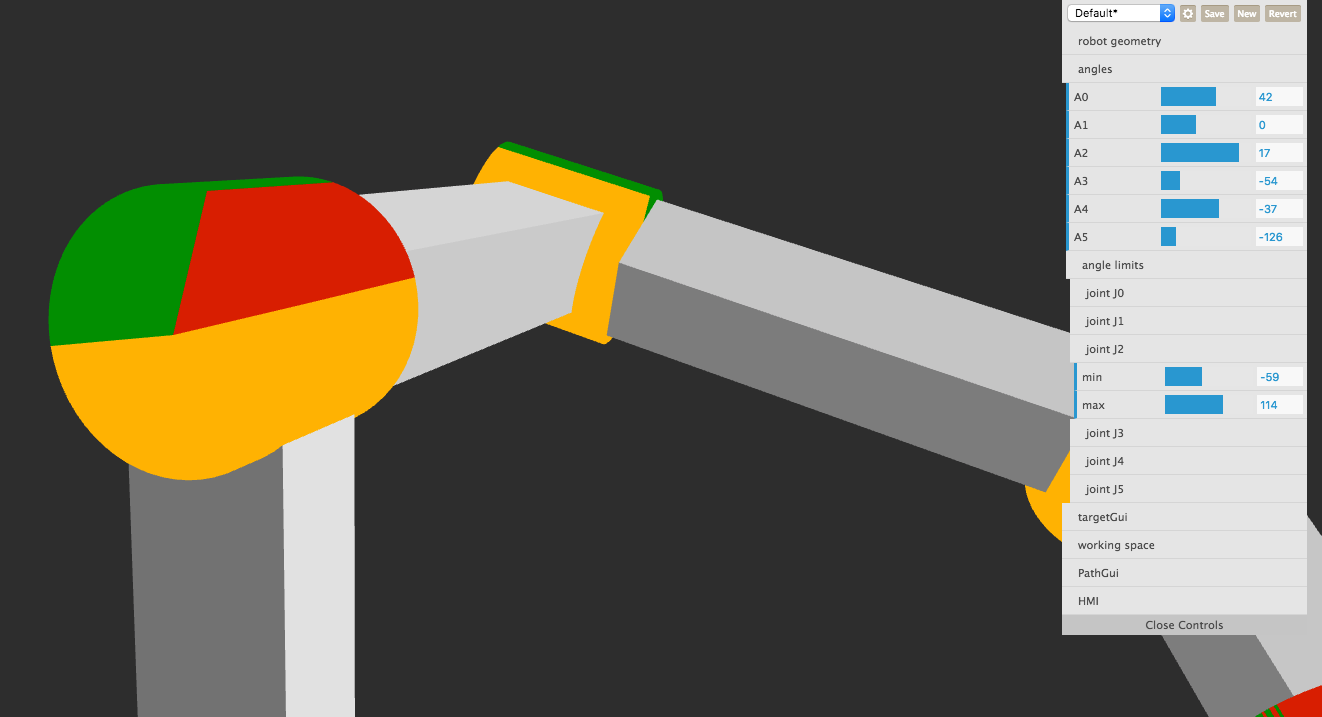
Angle limits are shown visualy. red negative, green positive
Switch between global and TCP aligned controls
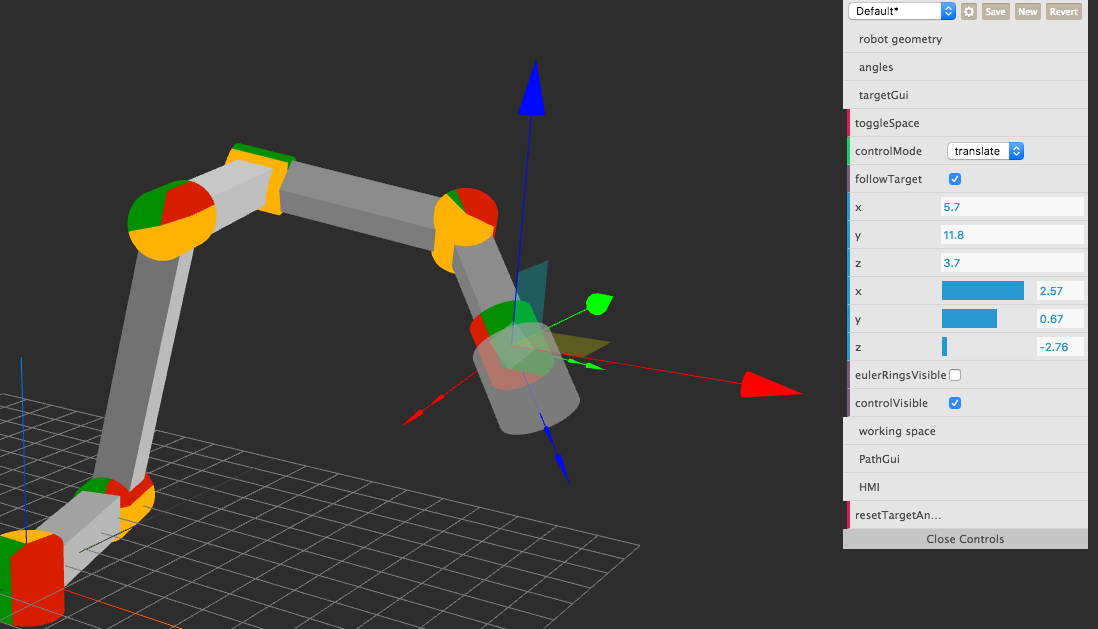
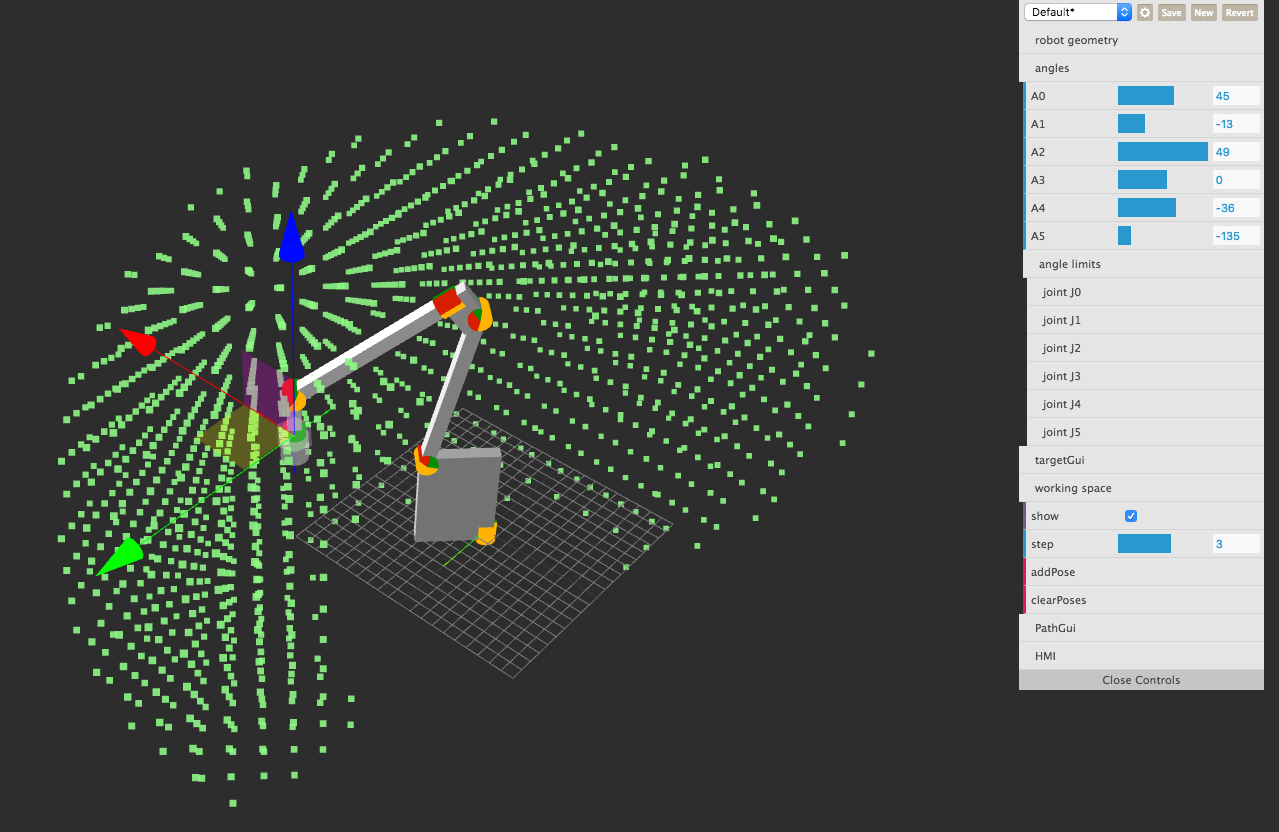
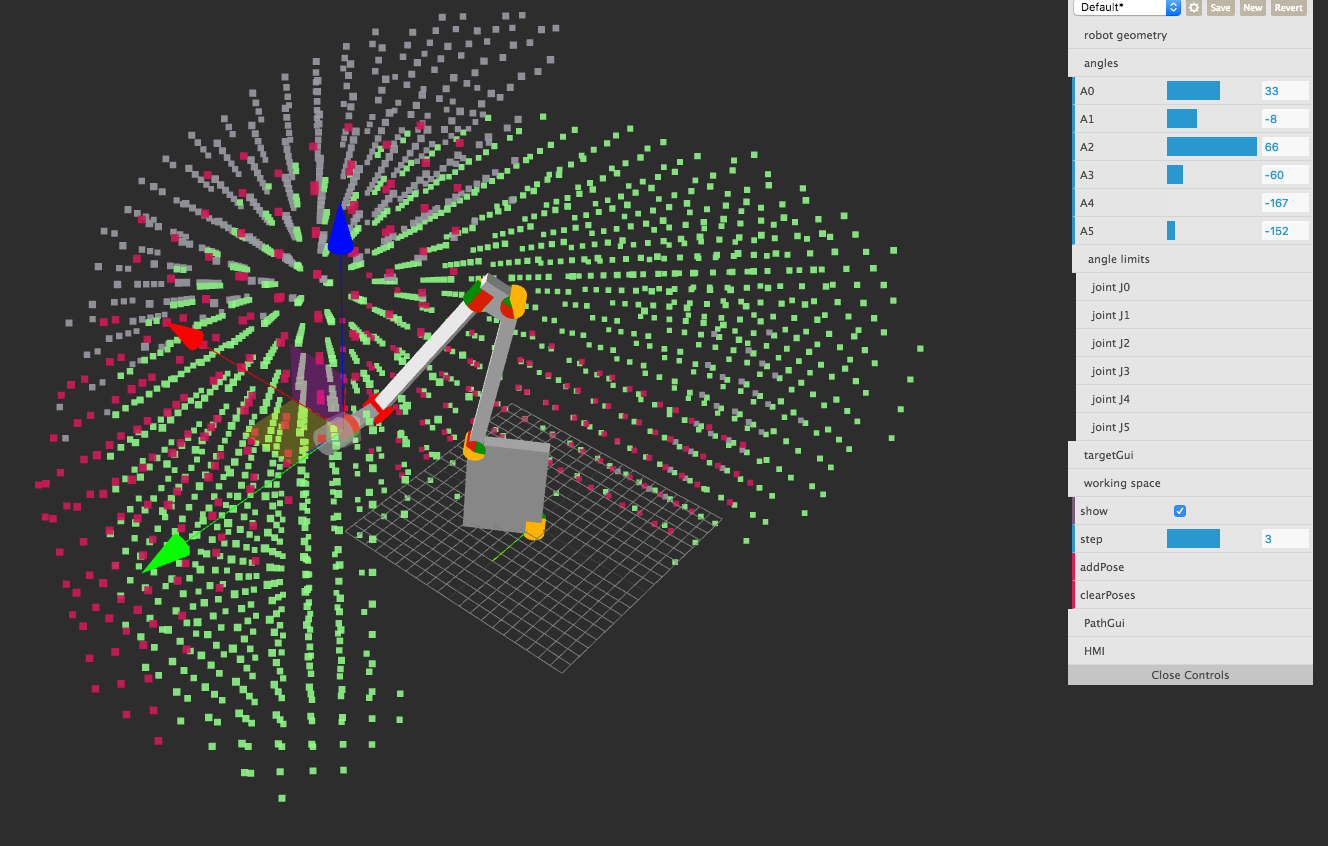
Click add Pose to visualize the working area for the current TCP orientation. Add muliple poses to compare work area vs orientation.
Check out the live demo or dive into the source code to see how it's built.